Toyota CH-R Manual de Taller: Ubicación De Las Piezas
UBICACIÓN DE LAS PIEZAS
ILUSTRACIÓN

|
*1 |
ECM |
*2 |
BLOQUE DE RELÉS DEL COMPARTIMIENTO DEL MOTOR N° 1 |
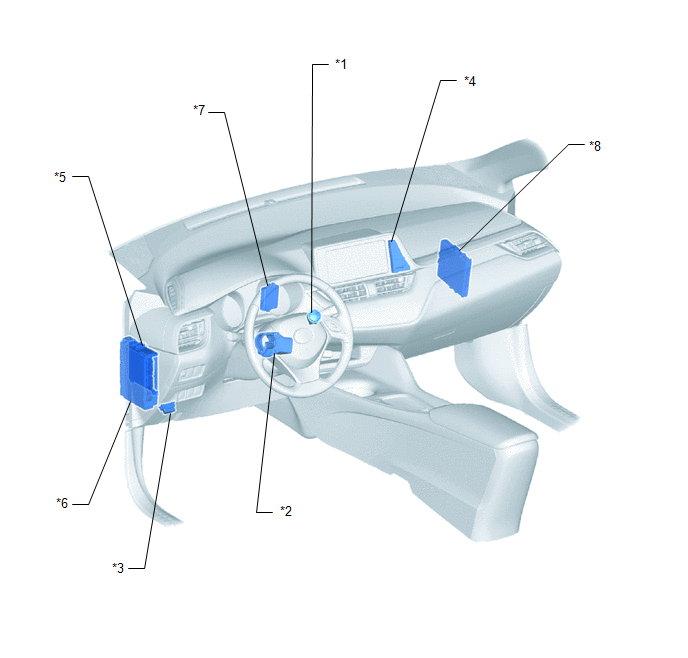
ILUSTRACIÓN
|
*1 |
INTERRUPTOR DEL MOTOR |
*2 |
ECU DE BLOQUEO DE LA DIRECCIÓN (CONJUNTO DEL SOPORTE SUPERIOR O ACTUADOR DEL MECANISMO DE BLOQUEO DE LA DIRECCIÓN) |
|
*3 |
DLC3 |
*4 |
CONJUNTO DEL RELOJ - INDICADOR LUMINOSO DE SEGURIDAD |
|
*5 |
ECU PRINCIPAL DE LA CARROCERÍA (ECU DE LA RED MÚLTIPLEX DE LA CARROCERÍA) |
*6 |
CONJUNTO DEL BLOQUE DE EMPALMES DEL PANEL DE INSTRUMENTOS - FUSIBLE AM2 - FUSIBLE ECU-IG2 N° 3 - FUSIBLE STRG LOCK - FUSIBLE ECU-B N° 1 |
|
*7 |
CAJA DE CÓDIGOS ID (ECU DEL CÓDIGO DEL INMOVILIZADOR) |
*8 |
ECU DE CERTIFICACIÓN (CONJUNTO DE LA ECU DE LA LLAVE INTELIGENTE) |
 Diagrama Del Sistema
Diagrama Del Sistema
DIAGRAMA DEL SISTEMA
...
 Cómo Proceder A La Localización De Averías
Cómo Proceder A La Localización De Averías
PRECAUCIÓN / AVISO / OBSERVACIÓN
OBSERVACIÓN:
Siga estos procedimientos para localizar las averías del sistema inmovilizador.
*: Utilice el Techstream.
PROCEDIMIENTO
...
Otros materiales:
Toyota CH-R Manual del propetario > Operaciones básicas: Interruptores del sistema de audio en el volante
Algunas de las funciones del sistema de audio pueden controlarse mediante
los mandos del volante.
El funcionamiento podría variar dependiendo del tipo
de sistema de audio y de navegación. Para más información, consulte el manual
que se entrega junto con el sistema de audio y el sistema de nav ...
Toyota CH-R Manual de Taller > Conjunto Del Eje Propulsor Delantero: Inspección
INSPECCIÓN
PROCEDIMIENTO
1. INSPECCIONE EL CONJUNTO DEL EJE PROPULSOR DELANTERO
(a) Asegúrese de que no hay un juego excesivo en el sentido radial de
la junta exterior.
(b) Asegúrese de que la junta interior se desliza suavemente y sin ...
Toyota C-HR (AX20) 2023-2026 Manual del propetario
Toyota CH-R Manual del propetario
- Para su información
- índice de imágenes
- En aras de la seguridad
- Conjunto de instrumentos
- Funcionamiento de cada componente
- Conducción
- Sistema de audio
- Características interiores
- Mantenimiento y cuidados
- En caso de problemas
- Especificaciones del vehículo
- índice
Toyota CH-R Manual de Taller
- Asistencia Al Estacionamiento / Supervisión
- Audio / Vídeo
- Comunicación Móvil
- Pantalla De Navegación / Información Múltiple
- Columna De Dirección
- Engranaje / Varillaje De La Dirección
- Sistemas De Dirección Asistida
- Claxon
- Espejos Retrovisores (ext)
- Guarnición / Paneles Exteriores
- Iluminación (ext)
- Limpia / Lavaparabrisas
- Puertas / Portón Trasero
- Ventanillas / Cristales
- Freno De Estacionamiento
- Frenos (delanteros)
- Frenos (traseros)
- Sistema De Frenos (otros)
- Sistemas De Control Dinámico / Control De Frenos
- Batería / Carga 3zr-fae
- Distribución De La Electricidad
- Red
- Introducción
- Mantenimiento
- Anticolisión
- Asientos
- Bloqueo De Las Puertas
- Calefacción / Aire Acondicionado
- Cinturón De Seguridad
- Espejo Retrovisor (int)
- Guarnición / Paneles Interiores
- Iluminación (int)
- Medidor / Contador / Visualizador
- Sistema Antirrobo / Acceso Sin Llave
- Sistemas Complementarios De Sujeción
- Tomas De Corriente (int)
- Alineación / Diagnóstico De Manejo
- Control De La Presión De Los Neumáticos
- Neumáticos / Ruedas
- Suspensión Delantera
- Suspensión Trasera
- Eje De Transmisión / árbol De Transmisión
- Eje Y Diferencial
- K114 Cvt
0.0098