Toyota CH-R Manual de Taller: Descripción Del Sistema
DESCRIPCIÓN DEL SISTEMA
BREVE DESCRIPCIÓN
(a) La red de área del controlador (CAN) es un sistema de comunicación de datos en serie para la aplicación en tiempo real. Se trata de un sistema de comunicación múltiplex del vehículo que dispone de alta velocidad de comunicación y una función de detección de averías.
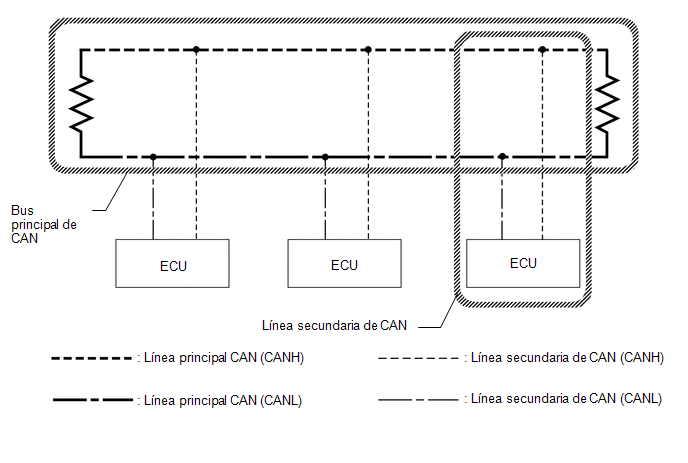
(b) Mediante el acople de las líneas de bus de CANH y CANL, se realiza la comunicación CAN a través de una tensión diferencial. (Se aplica una tensión base al par de líneas y se crea una tensión diferencial al efectuar la comunicación).
(c) Muchas de las ECU o sensores instalados en el vehículo funcionan compartiendo información y comunicándose entre sí.
(d) 2 resistores que son necesarios para la comunicación se utilizan en una línea bus principal CAN.
DEFINICIÓN DE TÉRMINOS
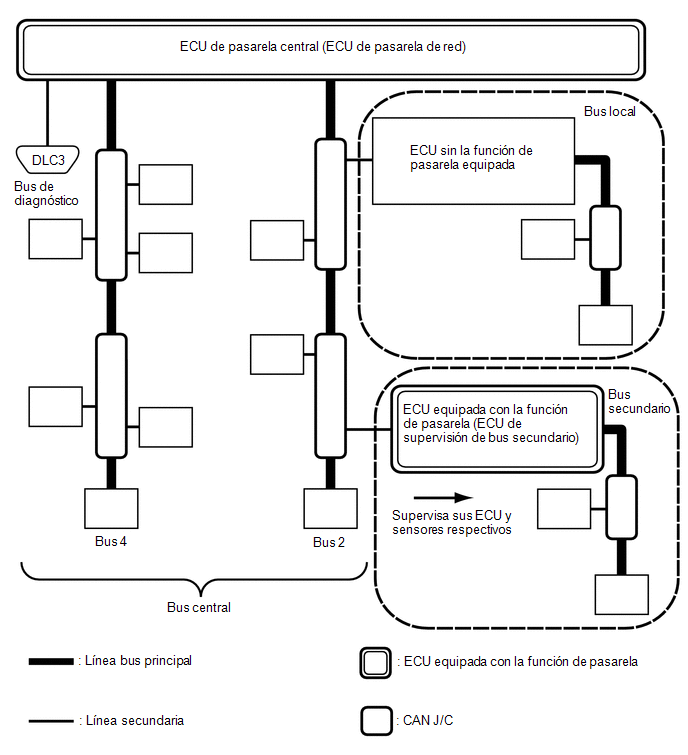
(a) Bus central
(1) El bus central es un término empleado para describir todos los buses conectados directamente a la ECU de pasarela central (ECU de pasarela de red).
OBSERVACIÓN:
Un bus aparece como Bus en la pantalla de comprobación del bus de comunicación del Techstream.
(b) Bus secundario
(1) Un bus secundario es un bus que cuenta con una ECU equipada con la función de pasarela para comunicarse con el bus central y el resto de buses secundarios.
OBSERVACIÓN:
- Un subbus aparece como Sub bus en la pantalla de comprobación del bus de comunicación del Techstream.
- Cuando se selecciona el bus secundario en la pantalla "Communication Bus Check", las ECU y sensores conectados a las redes no CAN, como LIN, pueden mostrarse también además de las ECU y sensores conectados a buses secundarios de la red CAN.
(c) Bus local
(1) Un bus local es un bus que no tiene la capacidad de comunicarse con otros buses. Las ECU y sensores en un bus local solo pueden comunicarse con otras ECU y sensores del mismo bus.
(d) CAN J/C
(1) El conector de empalmes de CAN es un conector que conecta líneas secundarias con un bus principal.
(e) Bus principal
(1) Una línea bus principal es un mazo de cables que se encuentra entre los 2 resistores límite del bus.
(f) Línea secundaria
(1) Una línea secundaria es un mazo de cables que conecta una ECU o sensor con una línea bus principal.
(g) Resistores límite
(1) Se instalan los resistores límite que mantienen una señal estable dentro del bus de CAN. Son necesarios 2 resistores de 120 Ω cada uno ubicados en cada uno de los dos extremos del bus.
 Ubicación De Las Piezas
Ubicación De Las Piezas
UBICACIÓN DE LAS PIEZAS
ILUSTRACIÓN
*1
CÁMARA DE RECONOCIMIENTO DE AVANCE
(con control de seguridad de Toyota P)
*2
ECM
*3
...
 Diagrama Del Sistema
Diagrama Del Sistema
DIAGRAMA DEL SISTEMA
(a) El sistema de comunicación CAN está compuesto por 5 buses.
*A
Con sistema de supervisión de punto ciego
-
-
...
Otros materiales:
Toyota CH-R Manual de Taller > Sistema De Llave Inteligente (para Función De Entrada): Lista Del Historial De Funcionamiento
LISTA DEL HISTORIAL DE FUNCIONAMIENTO
AVISO:
La causa de una avería se almacena en la RAM o EEPROM de la ECU de certificación
(conjunto de la ECU de la llave inteligente). Debido a que la causa de una
avería almacenada en la RAM se eliminará cuando se desconecte el cable del
...
Toyota CH-R Manual de Taller > Sistema Automático De Las Luces De Carretera: Pérdida de comunicación con el módulo de la cámara delantera (U023A)
DESCRIPCIÓN
Este DTC se memoriza cuando el sistema de comunicación CAN está averiado.
N° de DTC
Elemento detectado
Condición de detección del DTC
Área afectada
U023A
Pérdida de comunicación con el módulo de la cámar ...
Toyota C-HR (AX20) 2023-2026 Manual del propetario
Toyota CH-R Manual del propetario
- Para su información
- índice de imágenes
- En aras de la seguridad
- Conjunto de instrumentos
- Funcionamiento de cada componente
- Conducción
- Sistema de audio
- Características interiores
- Mantenimiento y cuidados
- En caso de problemas
- Especificaciones del vehículo
- índice
Toyota CH-R Manual de Taller
- Asistencia Al Estacionamiento / Supervisión
- Audio / Vídeo
- Comunicación Móvil
- Pantalla De Navegación / Información Múltiple
- Columna De Dirección
- Engranaje / Varillaje De La Dirección
- Sistemas De Dirección Asistida
- Claxon
- Espejos Retrovisores (ext)
- Guarnición / Paneles Exteriores
- Iluminación (ext)
- Limpia / Lavaparabrisas
- Puertas / Portón Trasero
- Ventanillas / Cristales
- Freno De Estacionamiento
- Frenos (delanteros)
- Frenos (traseros)
- Sistema De Frenos (otros)
- Sistemas De Control Dinámico / Control De Frenos
- Batería / Carga 3zr-fae
- Distribución De La Electricidad
- Red
- Introducción
- Mantenimiento
- Anticolisión
- Asientos
- Bloqueo De Las Puertas
- Calefacción / Aire Acondicionado
- Cinturón De Seguridad
- Espejo Retrovisor (int)
- Guarnición / Paneles Interiores
- Iluminación (int)
- Medidor / Contador / Visualizador
- Sistema Antirrobo / Acceso Sin Llave
- Sistemas Complementarios De Sujeción
- Tomas De Corriente (int)
- Alineación / Diagnóstico De Manejo
- Control De La Presión De Los Neumáticos
- Neumáticos / Ruedas
- Suspensión Delantera
- Suspensión Trasera
- Eje De Transmisión / árbol De Transmisión
- Eje Y Diferencial
- K114 Cvt
0.0182